
This on-going project is a Wifi interface for an old Y1999 Celestron Nexstar 5 telescope.
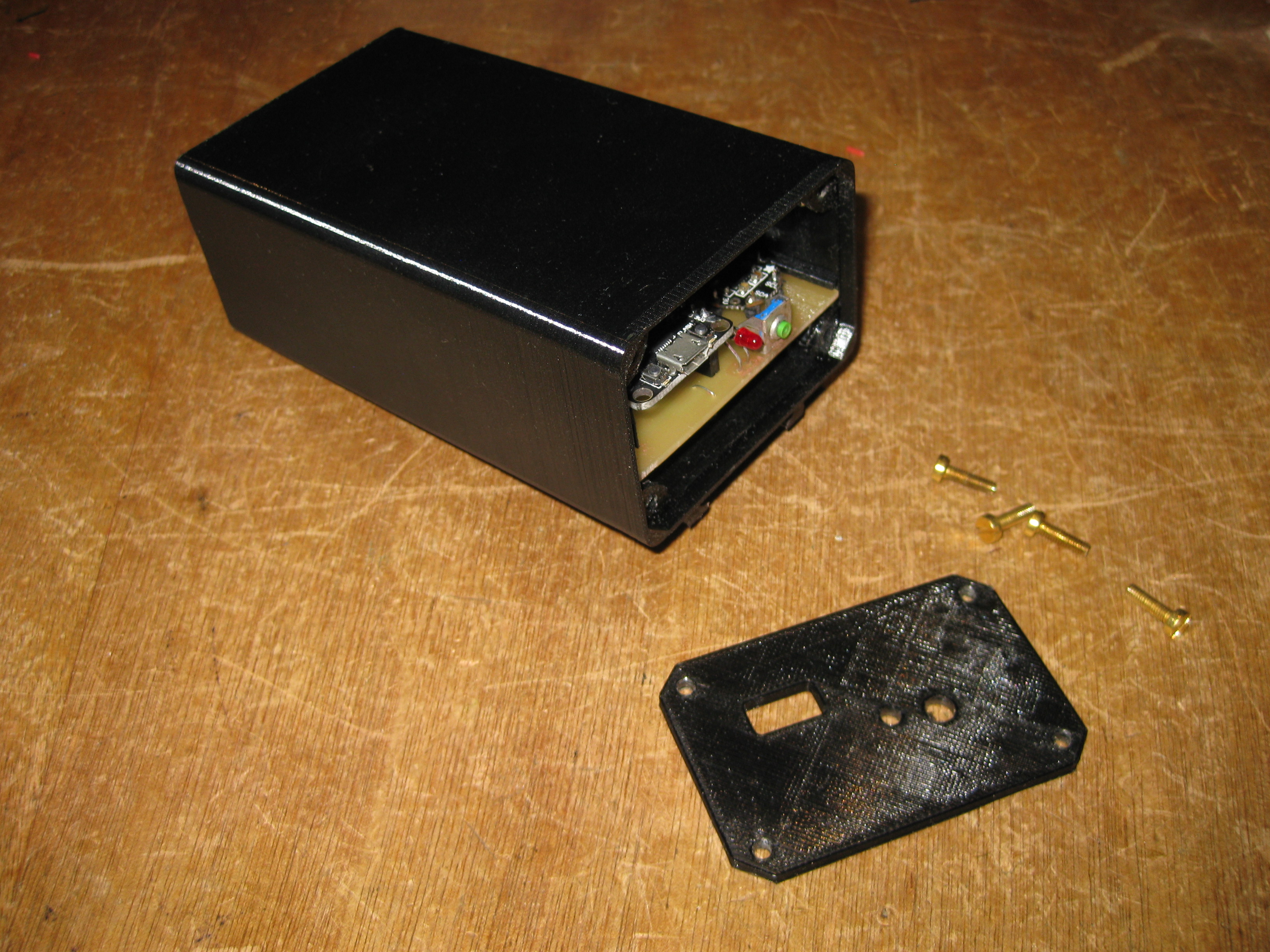
The interface box is connected between the handcontroller and the scope mount.
It provides with the following features:
- wifi connection
- web control panel
- automatic time and location set through Internet
- embedded digital compass and spirit level for easy alignment
- connector for motorized focuser (stepper motor driver)
- 5V connector for accessories, such as the finderscope
- IP interface to Stellarium


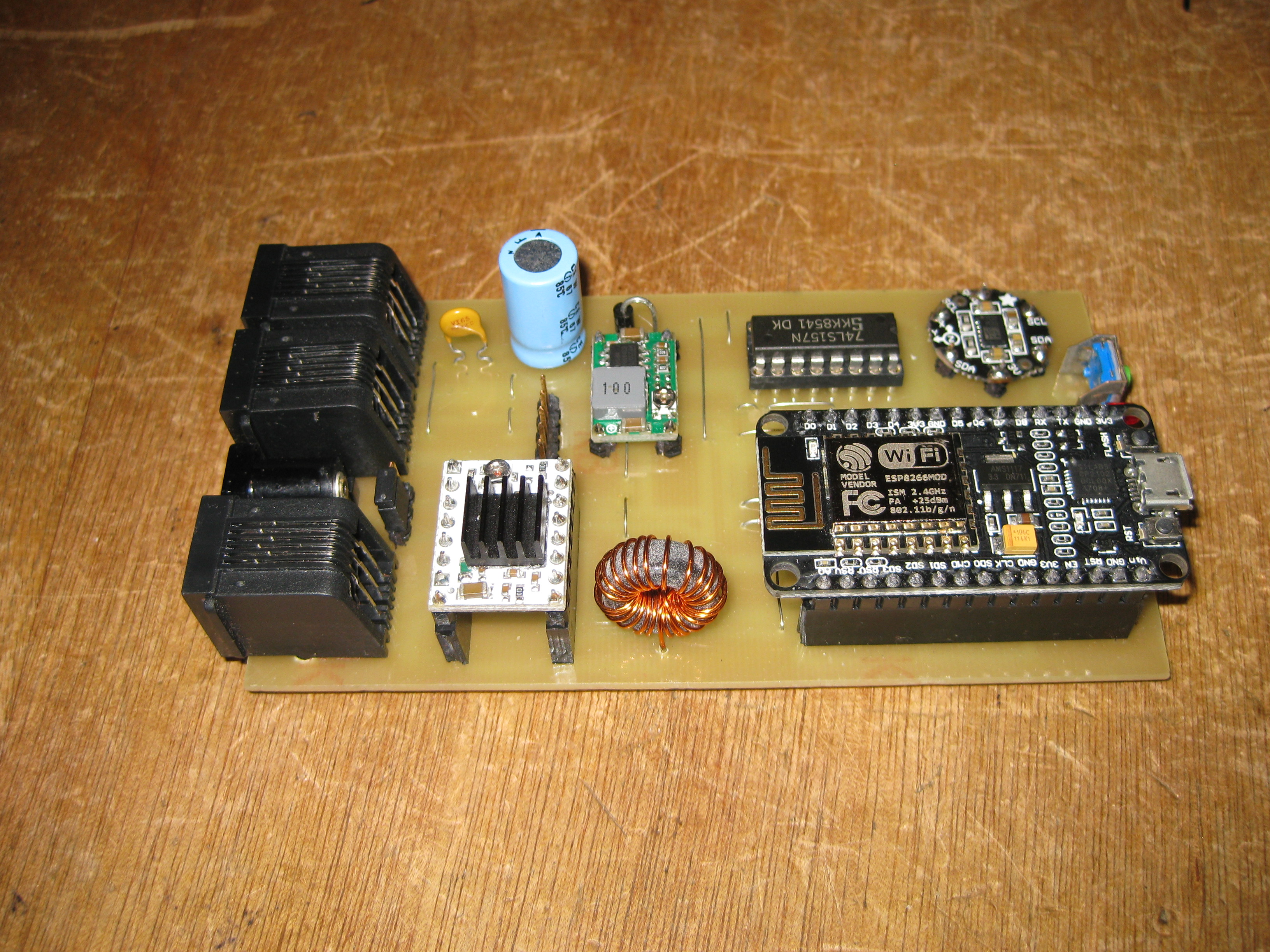
The “brain” is a NodeMCU ESP8266 module with a dedicated software.
I am using ESPUI for the web interface.
The mechanical design is available at https://www.thingiverse.com/thing:2903596

Currently the system is not very stable and is hanging randomly when using the Celestron mount power supply. Looks like the current peaks caused by Wifi transmission are disturbing the serial link. I plan to add an additional GND wire to decrease the impact of current peaks.
The tricky part of the project was understanding the transmission protocol. This is basically a master/slave synchronous proprietary protocol. I have spent hours with a logic analyser before being able to sent my first commands to the telescope controller.
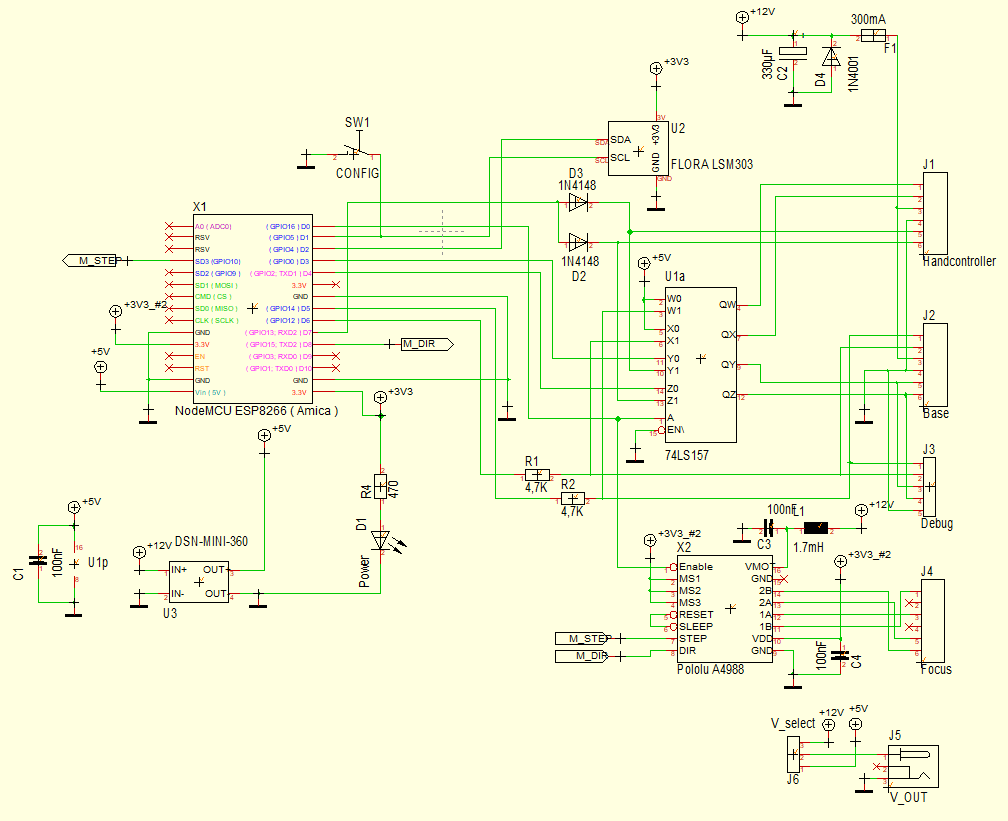
The interface box is connected between the base and the handcontroller so that manual operation remains possible. As the master is the handcontroller, or the wifi box, there is potential conflicts on the serial bus. I have designed an algorithm for detecting manual operation request and switch back the MUX (74LS157) to the handcontroller when required.
The automatic location configuration is based on geo-IP. That is ok for landline connections I have tested. However, there is an issue when using mobile phone for Internet connection because the geo-IP location is not accurate enough. I will add manual location setting in the future.
Here is the breadboard based prototype used to tune the electronics.

The software is working with this Y1999 handcontroller release. Few years later, the handcontroller electronics and protocol has been modified and is not compatible.

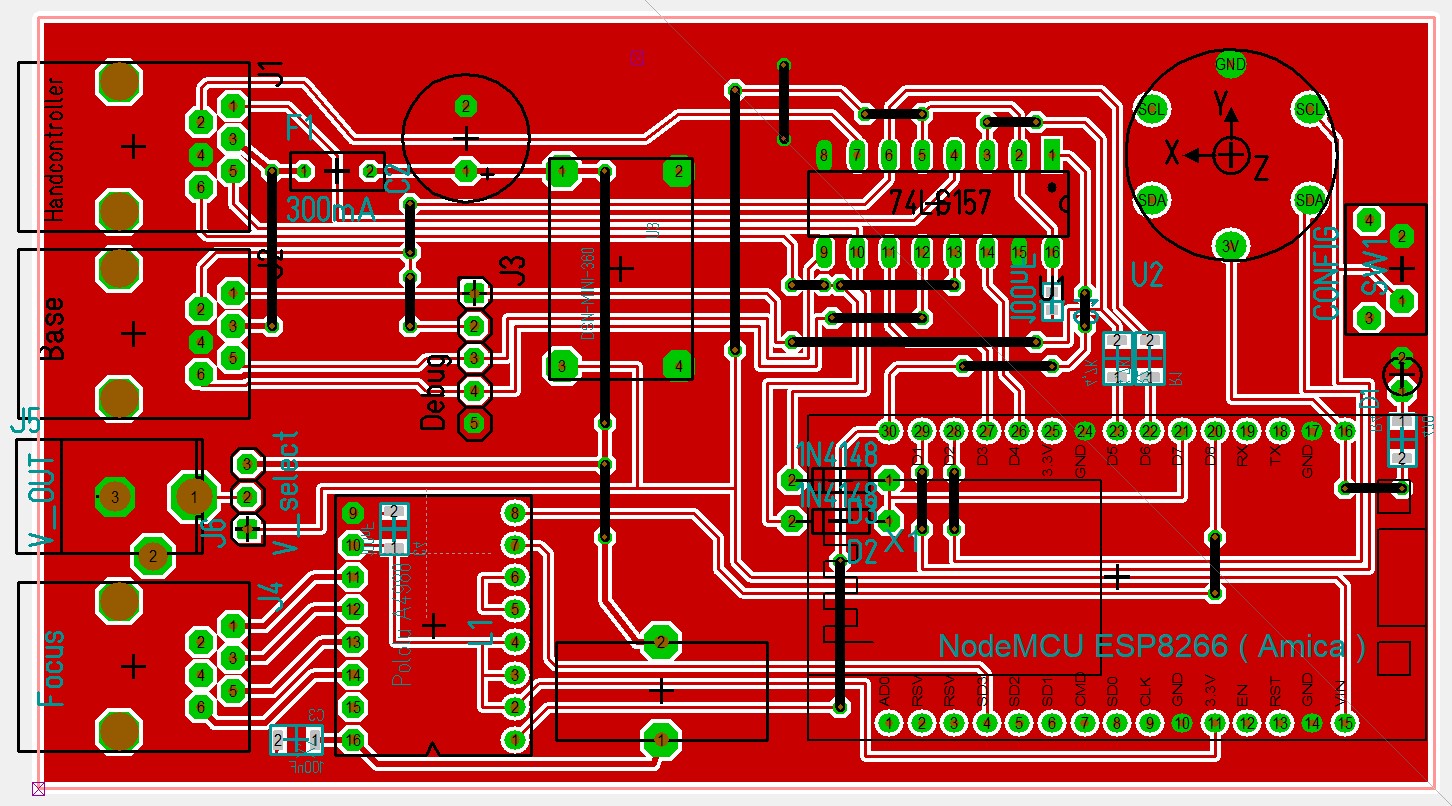
The current schematic diagram (edited on Target!3001 EDA).
I will publish more stuff when I have achieved good system stability.
Stay tuned!