
I needed this feature for my lathe control panel project. The goal is to drive the jog steps size by the rotation speed of the jog wheels.
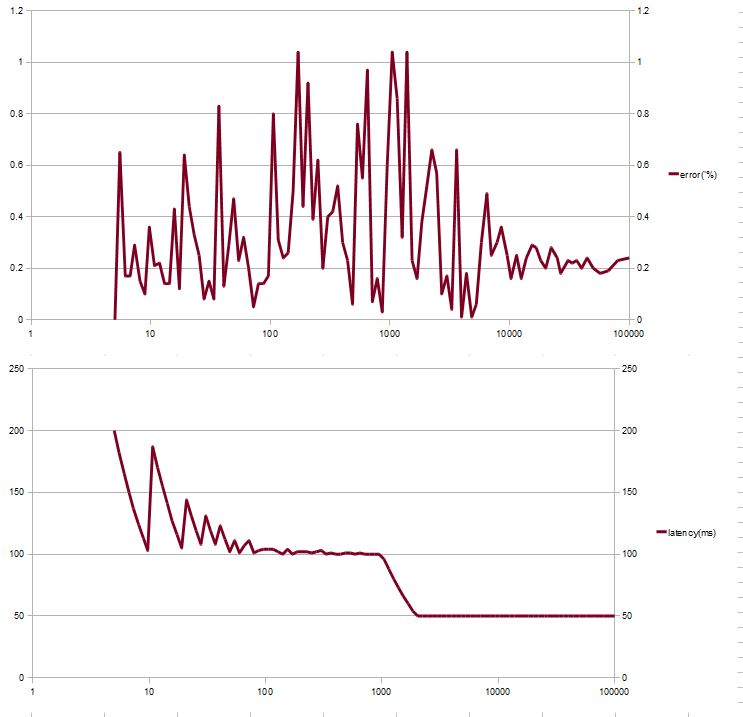
The algorithm has been validated from 5 Hz to 100 kHz.
Maximum measurement error is 1%. See curves below.
The patch is available here: https://github.com/f1oat/machinekit
HAL configuration
loadusr -w ../setup.sh loadrt threads name1=servo-thread period1=1000000 loadrt hal_pru_generic prucode=$(HAL_RTMOD_DIR)/xenomai/pru_generic.bin pru=0 num_encoders=1 num_pwmgens=1 pru_period=2500 halname=hpg addf hpg.update servo-thread addf hpg.capture-position servo-thread setp hpg.encoder.00.chan.00.A-pin 7 #925 ENCxI setp hpg.encoder.00.chan.00.counter-mode 2 #Up Counter (counts rising edges on A, always counts up, B ignored) setp hpg.pwmgen.00.out.00.pin 921 #PWM1 setp hpg.pwmgen.00.out.00.enable 1 setp hpg.pwmgen.00.pwm_period 1000000 setp hpg.pwmgen.00.out.00.value 0.5 start loadusr -w sleep 1 loadusr -w python encoder_test.py
encoder_test.py
#!/usr/bin/python
import subprocess
import time
import os
def readpin(p):
r = subprocess.check_output('halcmd -s show pin ' + p + '|head -1',shell=True)
lst = r.split()
return lst[3]
def setpin(p, v):
subprocess.check_output('halcmd -s setp %s %d' % (p, v), shell=True)
freq = 5.0
prev_freq = 0.0
maxerror = 0
f = open('result.csv', 'w')
line = 'in(Hz), out(Hz), err(%), latency(ms)'
print line
f.write(line + '\n')
time.sleep(2)
while freq < 100e3:
period = int(1e9/freq/2500) * 2500 # because pru_period=2500
real_freq = 1e9/period
if (real_freq <> prev_freq):
prev_freq = real_freq
setpin('hpg.pwmgen.00.pwm_period', period)
time.sleep(0.2)
measured_freq = float(readpin('hpg.encoder.00.chan.00.velocity'))
latency = float(readpin('hpg.encoder.00.chan.00.latency')) * 1e-6
error = abs(real_freq / measured_freq - 1.0)
maxerror = max(maxerror, error)
line = "%8.1f, %8.1f, %4.2f, %3.0f" % (real_freq, measured_freq, error*100.0, latency)
print line
f.write(line + '\n')
freq = 1.1*freq
f.close()
print "Max error %.1f%s" % (maxerror*100.0, '%')