
My new project is the retrofit of an Emco Turn 120P CNC lathe.
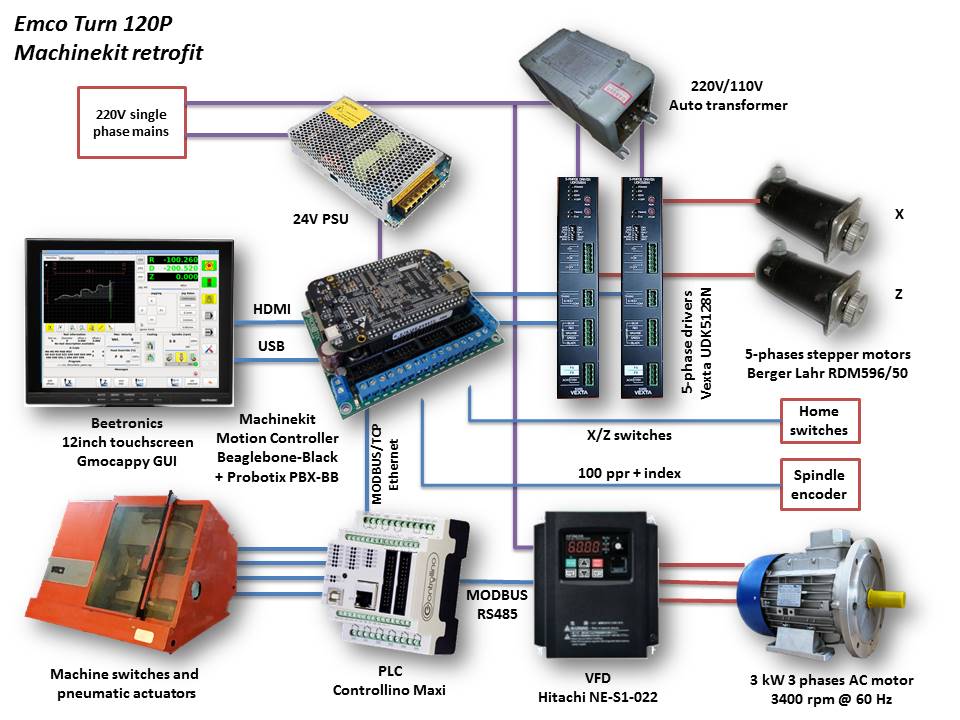
For the motion controller, I have chosen Machinekit running on a Beaglebone Black board. 12″ touchscreen with Gmoccapy GUI. A Controllino PLC to manage all non-realtime I/O such as the pneumatic chuck, the tailstock, the pumps, etc …
The original 5-phases stepper motors has been kept. They are driven by two Vexa UDK5128N drivers. Need 110V AC source for them, coming from an auto-transformer.
The original spindle DC motor has been replaced by a 3 kW AC motor driven by an Hitachi NE-S1-022 VFD. This VFD is controlled over MODBUS by the Machinekit controller through the PLC. I have patched the standard MODBUS over TCP stack to have a gateway to the RS485 bus.
Here is the global schematic diagram of the electronics.
Next step is the modification of the Probotix PBX-BB cape to give access to the eQEP2 quadrature encoder for the spindle position sensor.